![]()
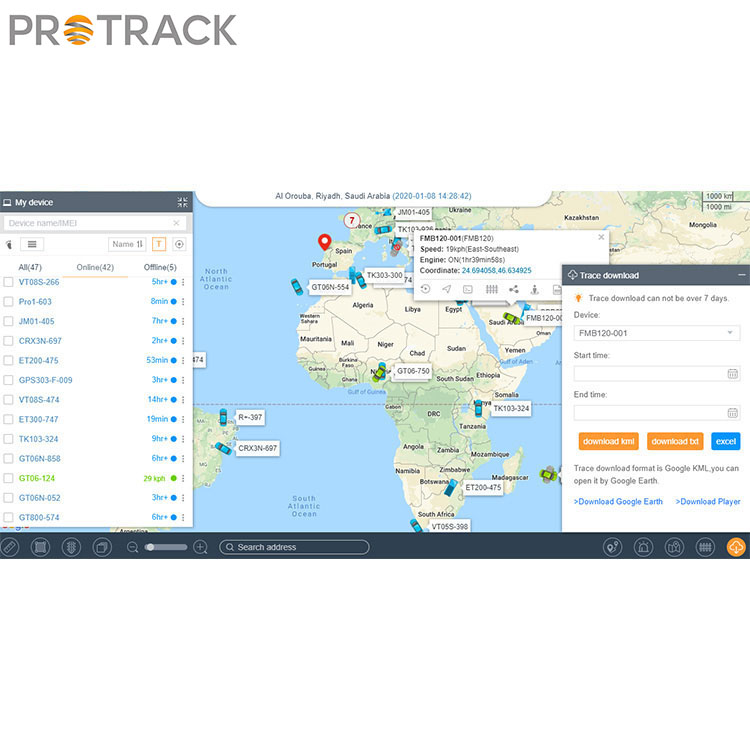
追跡ソフトウェア プラットフォームは 10,000 台以上のデバイスをサポートは非常に強力なソフトウェア プラットフォームです。GPS システムの前身は、米軍が開発した Meridian 衛星測位システム (Transit) です。 1958 年に開発され、64 年に正式に運用されました。このシステムは 5 ~ 6 個の衛星からなるスター型ネットワークで動作し、地球を最大 1 日に 13 回迂回し、高度情報は提供できず、測位精度は満足のいくものではありません。しかし、Meridian システムにより、研究開発部門は衛星測位の予備的な経験を得ることができ、衛星システムによる測位の実現可能性を検証し、GPS システム開発の基礎を築きました。なぜなら、衛星測位は航行において大きな利点を示しているが、子午線システムは潜水艦や船舶の航行において大きな欠点を抱えているからである。米国陸軍、空軍、公務員は皆、新しい衛星ナビゲーション システムが緊急に必要であると感じています。
この目的を達成するために、米国海軍研究所 (NRL) は、高度 10,000 km に 12 ~ 18 機の衛星による全地球測位ネットワークを形成するティンメーションと呼ばれる計画を提案し、67 年、69 年、および 74 年に実験衛星を打ち上げました。クロック タイミング システムは最初にこれらの衛星でテストされ、これが GPS システムの正確な測位の基礎となります。米空軍は、各星座に4~5個の衛星を搭載し、3~4個の星座を形成する621-B計画を提案している。これらの衛星はすべて同期軌道を使用し、残りの衛星は 24 時間周期の傾斜軌道を使用します。この計画では、擬似ランダム コード (PRN) を基礎として衛星測距信号を拡散します。その強力な機能により、信号密度が環境ノイズの 1% 未満であっても検出できます。擬似ランダム コードをうまく使用することは、GPS システムの成功の重要な基盤です。海軍の計画は主に船舶に低動的 2 次元測位を提供するために使用され、空軍の計画は高動的サービスを提供できますが、システムが複雑すぎます。 2 つのシステムを同時に開発すると莫大なコストがかかり、また、ここでの 2 つのプログラムは全地球測位を提供するように設計されているため、米国国防総省は 1973 年に 2 つを 1 つに統合し、国防総省が主導する衛星ナビゲーションおよび測位共同プロジェクトを開始しました。国防総省は計画局 (JPO) の指導の下、ロサンゼルスの空軍宇宙省にも事務所を設立しました。この組織には、米国陸軍、海軍、海兵隊、運輸省、国防地図庁、NATO、オーストラリアの代表者を含む多くの会員がいます。
追跡ソフトウェア プラットフォームは 10,000 台以上のデバイスをサポート あなたの良い選択です。